Światowe trendy w zakresie rozwoju układów napędowych środków transportu ukierunkowane są na ich elektryfikację.

Rezygnacja z szeroko stosowanych układów spalinowych dąży do redukcji lokalnej emisji szkodliwych i toksycznych składników spalin oraz generowanego hałasu. W trosce o środowisko, a także komfort lokalnych społeczności wiele akwenów drogą uchwały ustanowione zostało strefą ciszy. W strefie tej obowiązuje ograniczenie emitowanego hałasu do 45 dB, co tym samym oznacza wykluczenie możliwości korzystania ze sprzętu wodnego napędzanego silnikiem spalinowym na akwenie, którego taka uchwała dotyczy [1, 2]. Jednocześnie pozwala obciążyć karą grzywny osoby, które dopuściły się przekroczenia wskazanych ograniczeń. Należy podkreślić, że strefa ciszy obowiązuje już na większości jezior położonych w obrębie obszarów chronionych oraz na tych, które cieszą się szczególną popularnością wśród posiadaczy łodzi motorowych, które to wywierają niewątpliwie negatywny wpływ na otaczającą przyrodę oraz okolicznych mieszkańców. Pasjonaci sportów wodnych nie muszą jednak w pełni rezygnować ze spędzania czasu w takich miejscach – zakazem bowiem nie są objęte łodzie wyposażone w napęd elektryczny. Wzrastająca uważność na kwestie środowiska pozwala prognozować, że z czasem coraz więcej zbiorników wodnych zostanie objętych strefą ciszy. Napęd spalinowy, w jaki jest wyposażona jednostka pływająca może wówczas stanowić istotne ograniczenie dla jej użytkowania.
Zakup nowej, elektrycznej łodzi nie jest jedynym dostępnym rozwiązaniem. Klasyczne modele są z powodzeniem modernizowane i wyposażane w napęd elektryczny. Z łatwością odszukać można firmy specjalizujące się w retrofittingu [3], a więc w konwersji klasycznych łodzi do potrzeb użytkownika. Decydując się na montaż silnika elektrycznego, należy uprzednio ustalić, czy właściwy będzie silnik stacjonarny (tzw. wewnętrzny) czy zaburtowy (tzw. zewnętrzny) [4-8]. Wyboru dokonać należy, bazując na indywidualnych wymaganiach użytkownika wynikających zwłaszcza z przeznaczenia danej jednostki pływającej.
Silnik zaburtowy mocowany jest na zewnątrz łodzi, co znacznie ułatwia jego naprawę i obsługę. Ponadto cechuje się niską masą oraz łatwością w prowadzeniu, stanowiąc rozsądny i ekonomiczny wybór dla początkujących użytkowników mniejszych łodzi [5-6]. Poszukując rozwiązania oferującego większą niezawodność w cięższych warunkach oraz na dłuższych trasach, bezpieczniejszym wyborem może okazać się silnik stacjonarny. Jest on umieszczony wewnątrz kadłuba łodzi, będąc tym samym lepiej chronionym przed szkodliwym wpływem czynników zewnętrznych. Co więcej, jego zabudowa przekłada się na lepsze tłumienie wibracji przenoszonych na kadłub. Cechy te sprawiają, że silnik wewnętrzny jest częściej wybierany przez doświadczonych użytkowników.
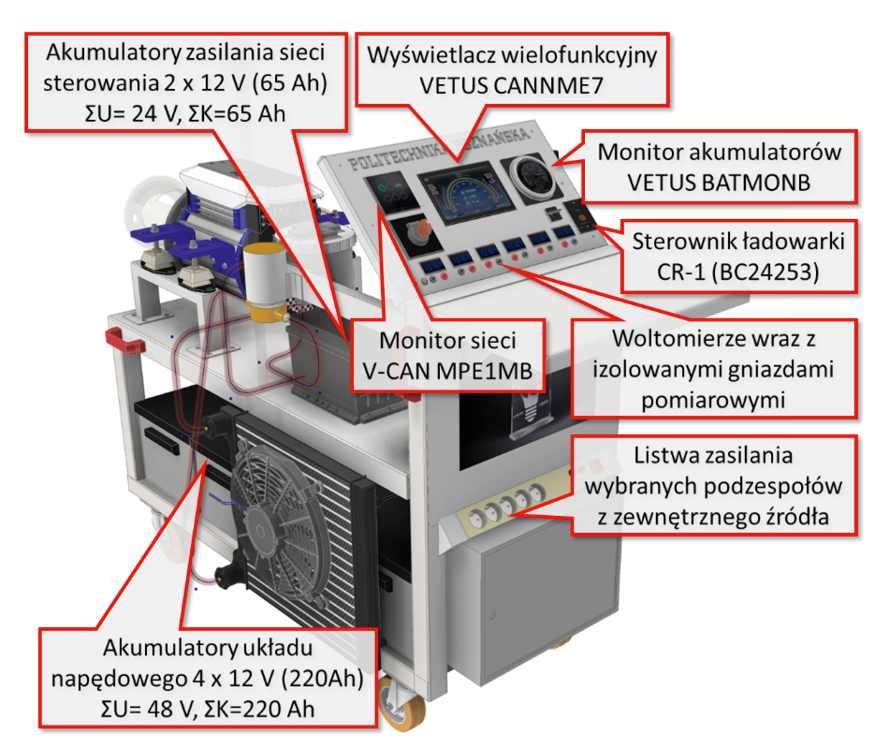
W celu realizacji diagnostyki i badań dotyczących energochłonności nowych napędów elektrycznych, zaprojektowano oraz wykonano stanowisko badawcze wyposażone w kompletny układ napędowy składający się z systemu magazynowania energii, silnika elektrycznego VETUS E-Line 7500 W oraz systemu sterowania realizowanego przez sieć V-CAN. Pozwala ono na odniesienie zużycia energii do zastosowanego źródła energii, a także do charakterystyki obciążenia generowanego podczas pływania. Wnioski wyciągnięte w toku badań pozwolą lepiej przygotować się do elektryfikacji wkraczającej w sektor jachtowy.
Dynamiczny rozwój rynku elektrycznych silników wewnętrznych umożliwia przeprowadzenie ich analizy użytkowej. Dobór silnika do łodzi może być uzależniony od takich parametrów jak jego moc maksymalna, masa, napięcie zasilania czy maksymalna prędkość obrotowa wału. Te podstawowe parametry pozwalają zawężać wybór silnika do napędu poszczególnych jednostek pływających. Poniżej przedstawiona analiza dotyczy stacjonarnych silników elektrycznych w przedziale mocy do 10 kW wybranych producentów.
Wybór silnika często podyktowany jest możliwością budowy sieci zasilającej na pokładzie statku. Większość analizowanych silników (rys. 1) w przedziale mocy do 10 kW pracuje pod napięciem U = 48 V, jedynie konstrukcja DriveMaster 8 A producenta Bellmarine przystosowana jest do napięcia pracy U = 96 V, jednak takie zasilanie wymaga już dodatkowych zabezpieczeń. Budowa sieci napięciowej U = 48 V wykonywana jest często przez połączenie szeregowe 4 takich samych akumulatorów. Dla omawianego zestawienia akumulatorów rozpiętość mocy silników elektrycznych do zabudowy wewnętrznej znajduje się w zakresie 4–10 kW (większe moce silników elektrycznych nie są analizowane w artykule). Istnieją również dwie mniej spotykane konfiguracje dla silników niskich mocy. Stosując połączenie szeregowe dwóch akumulatorów 12 V i tworząc w ten sposób sieć elektryczną o napięciu U = 24 V możliwe jest zabudowanie silników o mocy od 2,5 kW do 4 kW producentów VETUS, Aquamot czy Elco. W przypadku sieci U = 36 V dostępny jest silnik 3,5 kW firmy Aquamot.
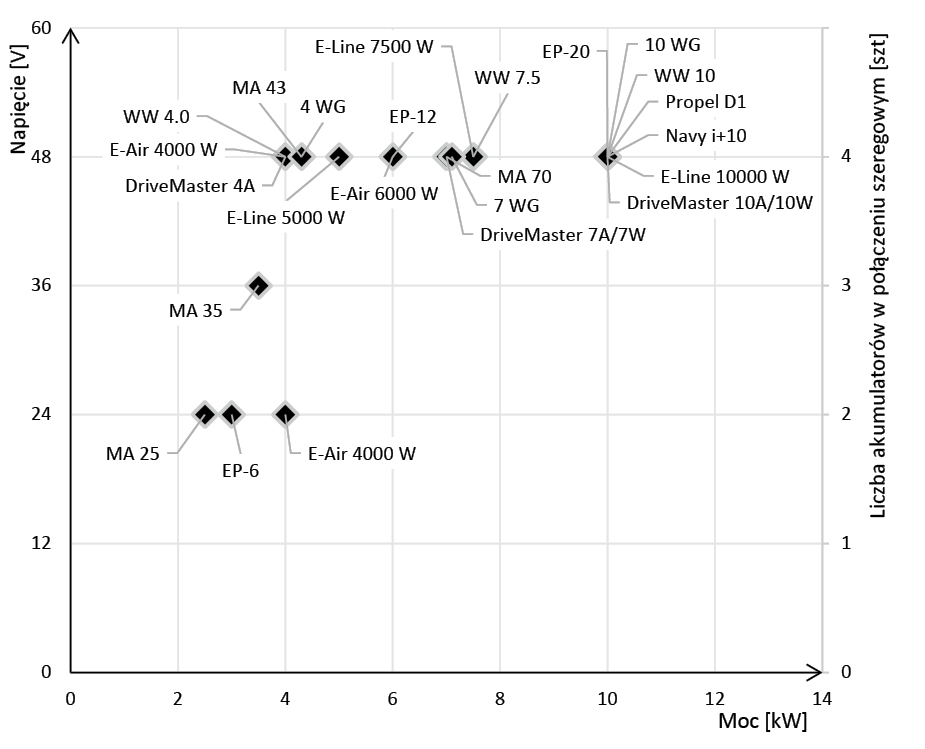
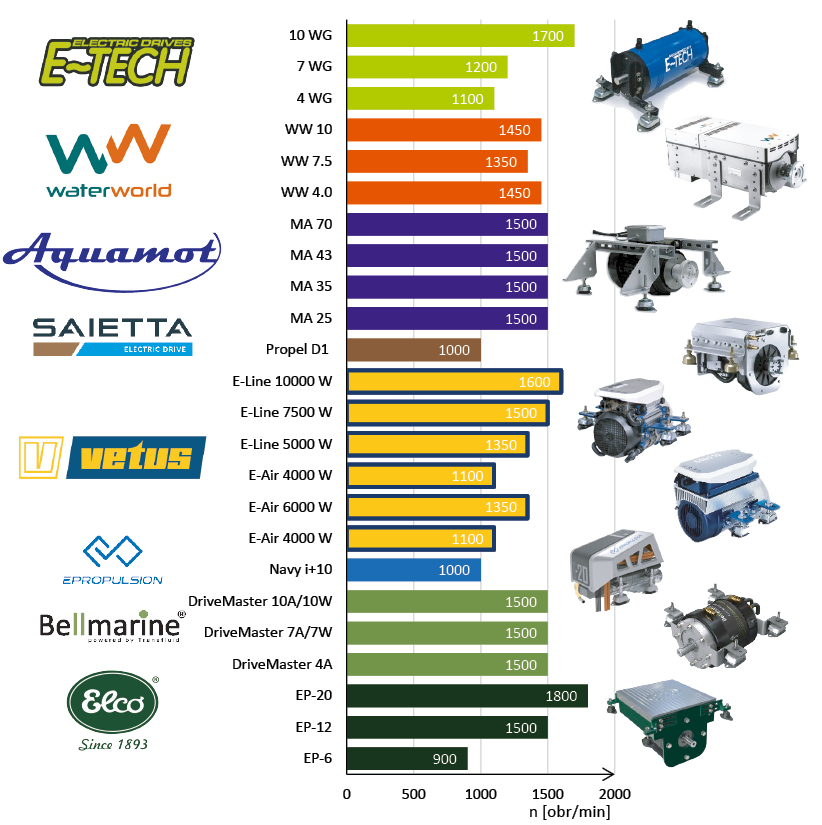
Dobór silnika wewnętrznego często podyktowany jest charakterystyką śruby napędowej i wymaganą prędkością wału. Z analizy wybranych konstrukcji (rys. 2) można zauważyć, że część producentów posiada gamy silników o równej maksymalnej prędkości (Aquamot i Bellmarine) dla wszystkich zakresów mocy maksymalnych. Pozostali analizowani producenci proponują rozwiązania o wyższej maksymalnej prędkości obrotowej wobec wzrastającej mocy maksymalnej silnika. Obecnie charakterystyki mocy i momentu nie są przedstawiane przez prezentowane firmy.
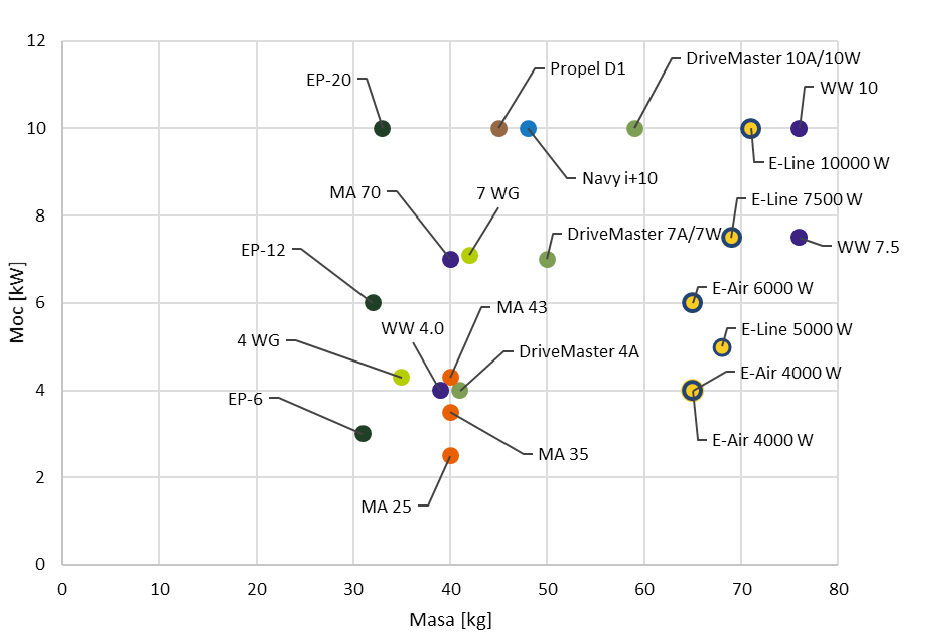
W zależności od modelu łodzi konieczne jest również uwzględnienie masy silnika, która może mieć znaczący wpływ na właściwości nautyczne jednostki pływającej. Zestawienie mas silników względem wytwarzanej mocy przedstawiono na rysunku 3. Warto zauważyć, że silniki pewnych producentów cechują się zbliżoną masą przy różnych wartościach mocy znamionowej. Silniki firmy VETUS charakteryzują się większą masą, jednak uwzględniają one w swej budowie system chłodzący, sterujący oraz wspomaganie ładowania. Systemy te w innych jednostkach napędowych są odrębnymi elementami, a ich masy nie są uwzględnione w tym zestawieniu.
Osiągi łodzi nie są determinowane jedynie przez dobór silnika, ale także przez zestawienie współpracującego z nim układu przeniesienia napędu. Przeważnie spotykane układy napędowe to układ śruby na sztywnym wale oraz układ typu „Z”. Układ ze sztywnym wałem cechuje się zastosowaniem przekładni redukcyjno-nawrotnej napędzającej wał wraz ze śrubą wyposażoną dodatkowo w płytę sterowną. Spotkać go można chociażby na łodziach rybackich czy ratunkowych. Drugim z wymienionych układów jest układ typu „Z”, którego nazwa poniekąd obrazuje układ wałów przeniesienia mocy – poziomy wał wejścia mocy oraz poziomy wał zdawczy połączone pionowym wałem przeniesienia mocy [7, 8]. Układ ten, w przeciwieństwie do układu ze sztywnym wałem, nie wymaga stosowania dodatkowej przekładni redukcyjno-nawrotnej ani steru za śrubą, zapewniając jednocześnie manewrowość łodzi.
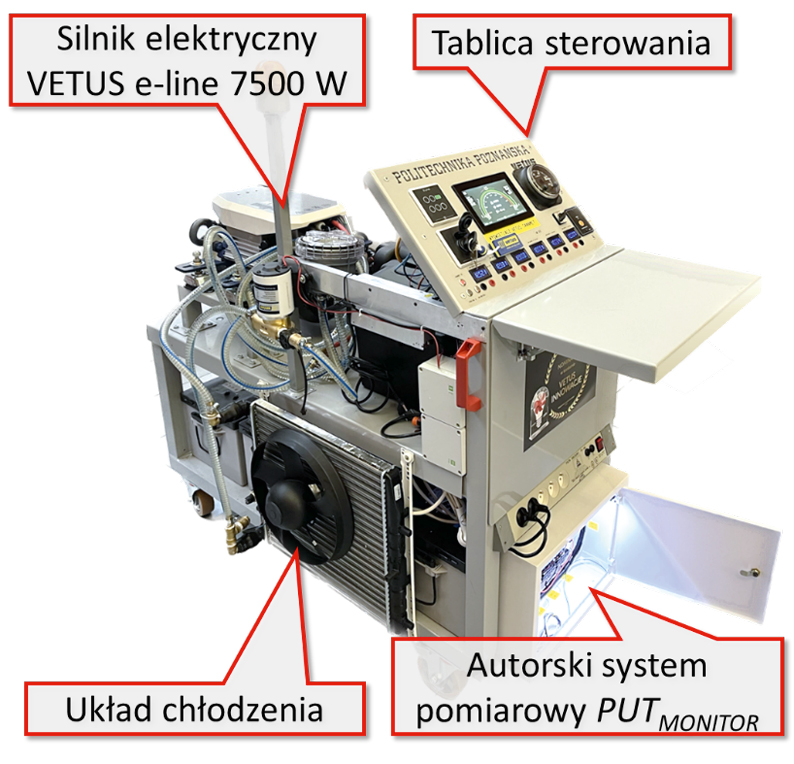
Wskazane powyżej różnice w konstrukcjach silników elektrycznych stwarzają konieczność rozpoznania ich właściwości napędowych zarówno w rzeczywistych warunkach eksploatacji, jak również w ustalonych punktach pracy, które nader często występują w trakcie żeglugi różnych jednostek pływających. W celu ich oceny zostało zaprojektowane i zbudowane stanowisko analizy energochłonności napędu elektrycznego VETUS E-Line 7500 W stosowanego w napędzie jednostek pływających. Układ wyposażony jest zarówno w fabryczną sieć V-CAN służącą do prezentowania informacji o trybach pracy napędu, jak i w autorski system pomiarowy umożliwiający prowadzenie badań i ich akwizycję z dużą częstotliwością. Stanowisko umożliwia symulację zmiennych warunków obciążenia oraz zasilania. Prowadzone badania zużycia energii przez napęd i dodatkowe podzespoły (układy sterowania i chłodzenia) w aspekcie analizy czasochłonności ładowania zasobników energii umożliwiają rozpoznanie charakterystyk ich współpracy. Modułowy projekt układu napędowego odwzorowuje obecne systemy pojazdów elektrycznych bez względu na środowisko ich eksploatacji. Dodatkową zaletą opisywanego układu napędowego jest możliwość podwyższenia napięcia ładowania Boosted Battery Charge. Dzięki temu można użyć standardowej ładowarki 24 V do ładowania pakietu akumulatorów układu napędowego do wymaganej wartości 48 V – sieć pokładowa nadal może być projektowana na małe wartości napięcia, zapewniając w ten sposób bezpieczeństwo użytkowania. Modułowy projekt stanowiska umożliwia prowadzenie analiz innych jednostek napędowych bądź zmiennych magazynów energii w przyszłości.
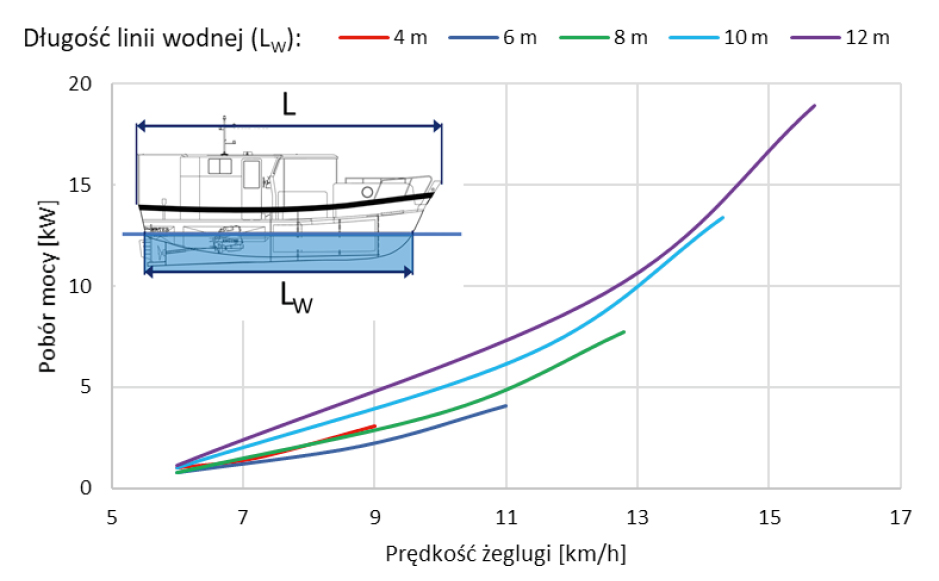
Obecne predykcje dotyczące poboru mocy dla silników stacjonarnych przedstawiane są dla wybranych prędkości żeglugi statków z kadłubami wypornościowymi. Dla każdej długości statku określona jest graniczna prędkość wypornościowa (rys. 4). Takie zestawienie nie uwzględnia jednak zmiennych warunków żeglugi, które znacząco mogą zmienić energochłonność napędu. Dlatego autorski system pomiarowy umożliwia jego aplikację również w rzeczywistych warunkach eksploatacji.
Proces budowy stanowiska rozpoczęto od doboru elementów układu napędowego, bazując na ofercie firmy VETUS, kolejno zaprojektowano specjalną mobilną ramę (rys. 5) oraz przystosowano istniejącą infrastrukturę laboratoryjną poprzez modyfikację hamulca firmy SCHENCK. Na podstawie przedstawionych modeli 3D opracowano elementy składowe stanowisk, które następnie wykonano z użyciem maszyn do cięcia laserowego, gięcia oraz spawania (rys. 6). Stanowisko badawcze zostało zaprojektowane w sposób zapewniający jego mobilność. Możliwe jest zarówno jego używanie w lokalizacji bez dostępu do źródła energii elektrycznej, jak i w pomieszczeniach laboratoryjnych wyposażonych w stanowisko hamowniane. Niezależność stanowiska uwzględniona została również w aspektach układu chłodzenia oraz analizy parametrów systemu.
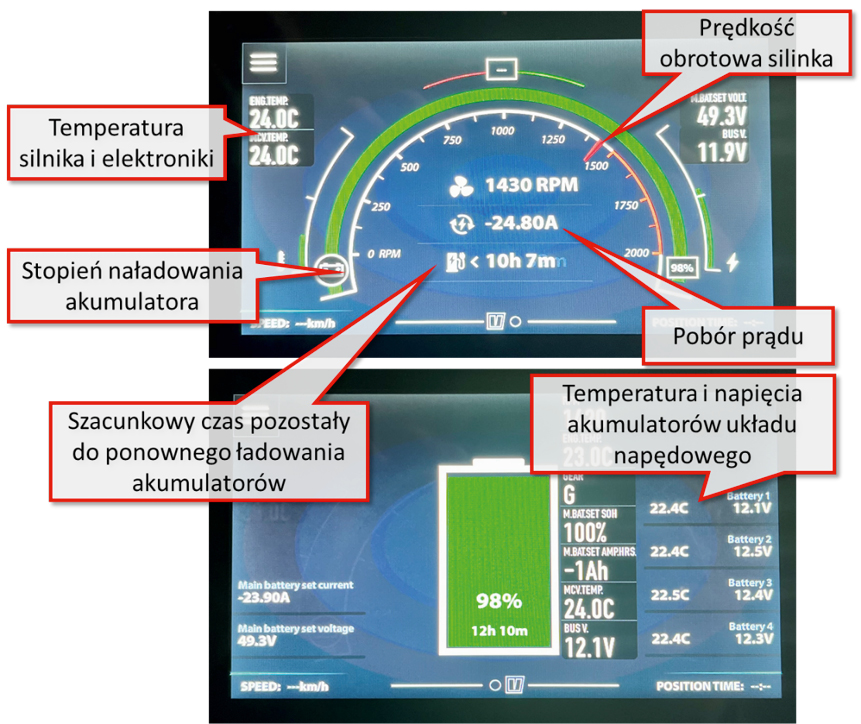
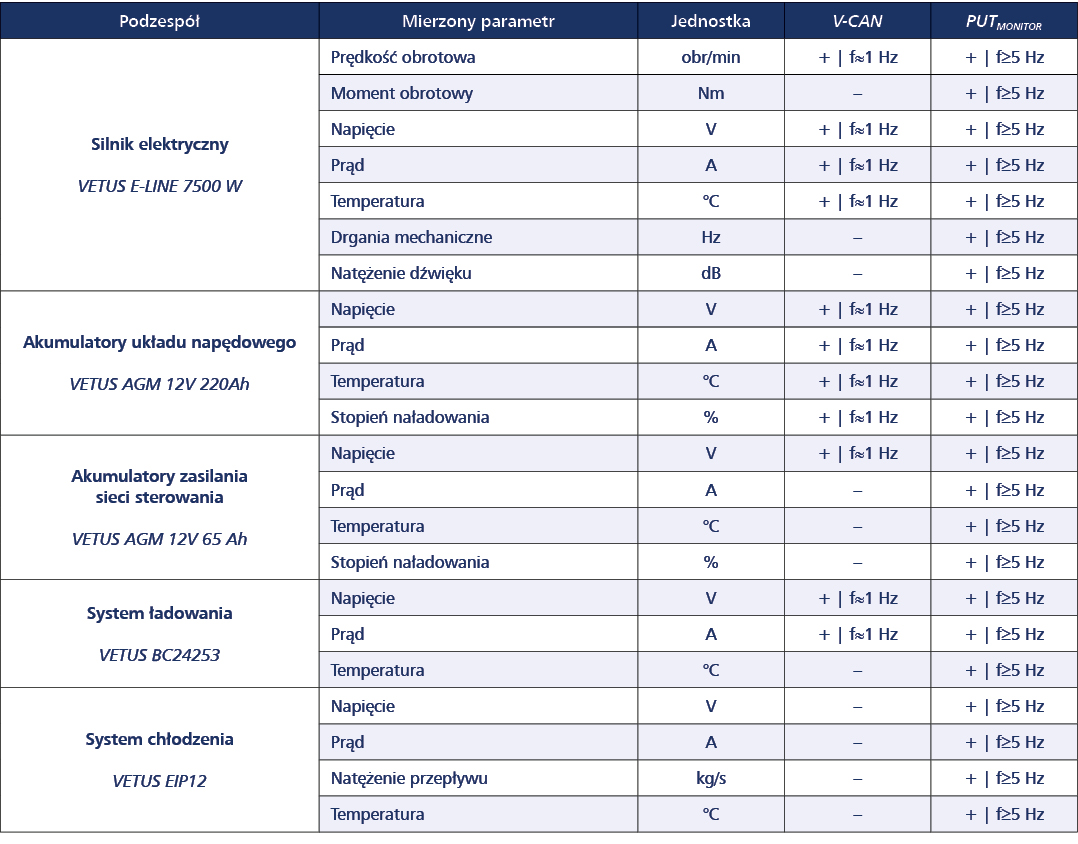
Energochłonność układu napędowego z punktu widzenia użytkownika jest kluczowym wskaźnikiem pozwalającym na ocenę możliwości jego eksploatacji. W ramach budowy stanowiska służącego pomiarom zużycia energii zaproponowano pomiar parametrów (tabela 1) w celu rozpoznania jego charakterystyk pracy. Konieczność budowy autorskiego systemu pomiarowego PUTMONITOR wynika z zapotrzebowania na wyższą częstotliwość (f) pomiarową, jak również rejestrację parametrów nierealizowaną przez system V-CAN – wyświetla on parametry w czasie rzeczywistym bez możliwości ich rejestracji (rys. 7).
Na podstawie mierzonych parametrów możliwa jest ocena ich zmian, usprawniająca użytkowanie elektrycznego systemu napędowego. Podstawowym parametrem wpływającym na możliwości użytkowania napędu elektrycznego jest stopień naładowania (SoC – State of Charge) akumulatorów. Jest on istotny ze względu na określenie zasięgu bądź czasu żeglugi na posiadanym pakiecie akumulatorów. Istnieje kilka metod pomiaru SoC, w tym metody oparte między innymi na pomiarze napięcia lub prądu.
Jedną z najczęściej stosowanych metod służących pomiarowi SoC jest metoda oparta na napięciu otwartym (OCV – Open Circuit Voltage) [11]. Wspomniana tu metoda polega na pomiarze napięcia na biegunach akumulatora bez podłączonych do niego żadnych urządzeń elektrycznych. Napięcie otwarcia będzie się różnić w zależności od stopnia naładowania akumulatora. Dlatego też można wykorzystać skalę napięcia otwartego do określenia SoC akumulatora. Należy jednak pamiętać, że dokładność pomiaru SoC za pomocą metody OCV może być ograniczona przez wiele czynników zewnętrznych, takich jak temperatura otoczenia, czas, który upłynął od ostatniego ładowania, a także wiek akumulatora i jego ogólny stan. Chociaż ocena SoC przy pomocy metody OCV zalicza się do jednej z najprostszych metod pomiarowych, wiąże się jednak z większym błędem dokładności pomiaru. Stan naładowania można opisać jako poziom naładowania baterii w stosunku do jej pojemności. Wartość SoC oblicza się jako stosunek pozostałej energii w akumulatorze w stosunku do jego maksymalnego stanu naładowania, a jego jednostką są punkty procentowe.
Coulomb Counting (CC) jest drugą z najczęściej stosowanych metod określania stanu naładowania (SoC) akumulatora. Polega ona na monitorowaniu prądu płynącego do lub z akumulatora oraz mierzeniu czasu, przez który ten prąd płynie. Pozwala to na obliczenie całkowitego ładunku (w kulombach), który przepłynął przez akumulator.

Określenie SoC odbywa się poprzez porównanie aktualnie zmierzonej ilości przepływającego przez akumulator ładunku z jego pojemnością nominalną. W ten sposób można obliczyć, ile procent naładowania pozostało w akumulatorze. Należy jednak pamiętać, że metoda Coulomb Counting jest oparta na idealnym zachowaniu akumulatora, a faktyczne wartości SoC mogą być zaburzone przez wiele czynników, takich jak temperatura, wiek akumulatora, rodzaj i sposób ładowania czy też stopień jego zużycia.
Dokładny pomiar wartości wskazanych w treści umożliwi prowadzenie kompletnej diagnostyki systemu napędowego oraz przyszłe analizy zagadnień ważnych dla amatora jachtingu. Ocena oraz bieżąca akwizycja rzeczywistej energochłonności układu napędowego i pozostałych komponentów koniecznych do jego funkcjonowania może przyczynić się do zmniejszenia zużycia energii, a co za tym idzie do wydłużenia czasu rejsu i jego zasięgu. W przyszłych pracach zaprezentowane zostaną wyniki badań wpływu prędkości i obciążenia na zużycie energii w omawianym układzie napędowym.
dr inż. Wojciech Cieślik
mgr inż. Jędrzej Zawartowski
inż. Weronika Antczak
Politechnika Poznańska
Wydział Inżynierii Lądowej i Transportu
Źródła:
[1] Gdzie w Polsce można pływać na silniku spalinowym? www.motosternik.pl
[2] Łodzie elektryczne – sposób na elektromobilność na polskich jeziorach? https://nettg.pl/
[3] From classic boat to electric boat, Lanéva embarks on its first retrofit project, https://powerboat.world/Europe/
[4] Cieślik W. Alternatywne napędy jednostek pływających – przegląd. Biuletyn Techniki Jachtowej. 2019, 3/2019
[5] Antczak W., Cieślik W. Diagnostyka i kontrola akumulatorów stosowanych w jachtingu. Biuletyn Techniki Jachtowej. 2022, 3/2022.
[6] Cieślik W. Napędy elektryczne w jachtingu rekreacyjnym. Biuletyn Techniki Jachtowej. 2022, 2/2022
[7] Silnik stacjonarny czy zaburtowy? https://lugia-marine.pl/
[8] Układy napędowe, http://www.marineengineering.pl/napedy/
[9] Electric Inboard Motor https://www.greenboatsolutions.com/shop/motor/inboard
[10] VETUS e-line 7500W https://vetus.com/pl/
[11] Battery State of Charge calculation, https://epicpowerconverters.com/