Napęd mechaniczny każdego jachtu motorowego czy żaglowego składa się z trzech części: źródła mocy (silnika spalinowego, niekiedy elektrycznego), części pośredniczącej w przenoszeniu mocy do pędnika, czyli mechanizmów napędowych, oraz z pędnika. Pędnikiem, czyli urządzeniem wytwarzającym siłę napędzającą jacht, jest śruba napędowa, ale może być też pędnik odrzutowy (strugowodny).

Bardzo popularnym rozwiązaniem napędu jest połączony układ wymienionych trzech części w jedną, w postaci silnika zaburtowego. Kolejnym pod względem liczby zastosowań jest napęd z wbudowanym silnikiem, nazywanym stacjonarnym, z przekładnią oraz z odpowiednio ukształtowaną linią wałów i śrubą napędową. Przy czym w napędach jachtów motorowych popularne są przekładnia Z (stern drive) i ostatnio tzw. napędy podowe. W napędach jachtów żaglowych częstym rozwiązaniem jest napęd S (sail drive). Wszystkie te napędy szczegółowo opisałem w książce „Dieslowskie napędy jachtów” oraz w artykułach zamieszczonych w Jachtingu Motorowym. Poza wymienionymi napędami, wprawdzie rzadziej, ale stosowane są jeszcze napędy strugowodne i powierzchniowe. W stosunku do tych pierwszych używa się też nazw: napęd odrzutowy, pędnik strumieniowy.
Napędy (pędniki) strugowodne
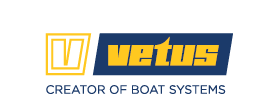
Napędem (pędnikiem) strugowodnym nazywa się takie urządzenie, z którego poza kadłub wyrzucany jest pompowany strumień wody, w kierunku przeciwnym do zamierzonego ruchu jachtu, dający odpowiedni napór. Nazywa się go również pędnikiem wodnoodrzutowym (jet), a nawet krótko: wodomiotem. Ten pompowany i wyrzucany poza kadłub strumień wody dobrze widoczny jest na rysunku 1.
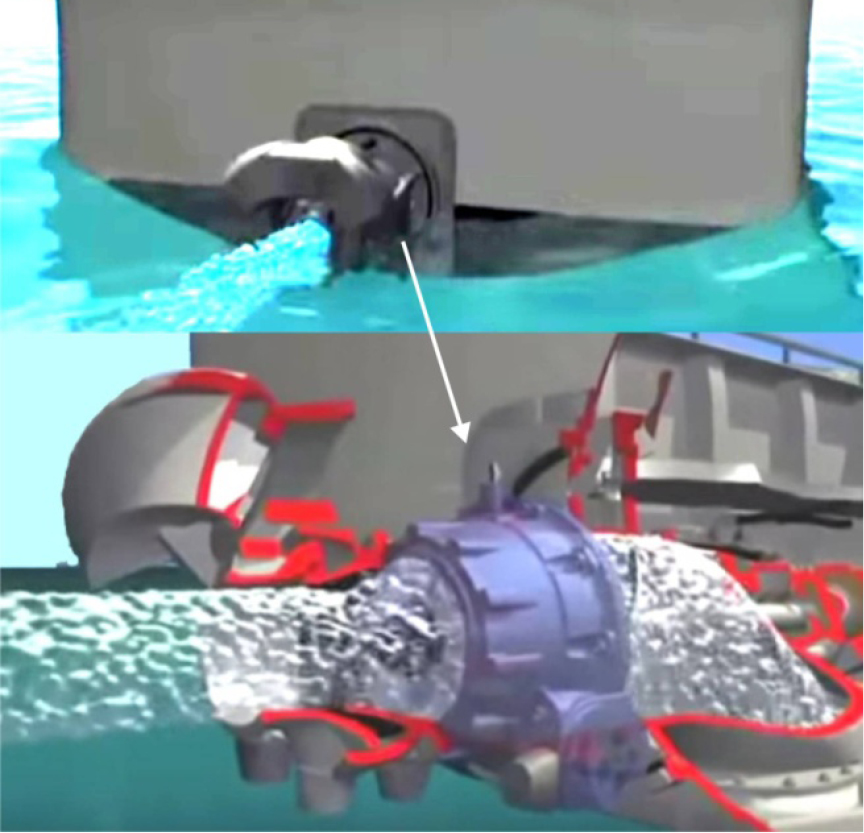
Pędnik taki może odchylać widoczny strumień wody za pomocą dyszy (rys. 2), dzięki czemu uzyskuje się funkcję steru, co szczegółowo wyjaśniono dalej w opisie schematu pędnika (rys. 3).

Pompa śmigłowa 1, napędzana za pomocą silnika spalinowego, zasysa wodę przez kratę wlotową 3, zabezpieczającą przed przedostaniem się do pompy rozmaitych zanieczyszczeń. Krata taka, umieszczona w dnie kadłuba, widoczna jest na rysunku 4.

W kanale obudowy 2, za śrubą napędową umieszczone są nieruchome łopatki (powierzchnie kierujące) 5 [2], które mają za zadanie prostowanie strumienia wody poprzez likwidację prędkości obwodowych strumienia wody powstającego za śrubą. Te łopatki nazywane są przeciwśrubą, a także prowadnicą. Woda wytłaczana jest na zewnątrz jachtu rufowym kanałem 4, rurowej obudowy 2 i dalej kanałem o kształcie dyszy zbieżnej (konfuzora) znajdującej się w obrotowym urządzeniu sterowym 6. To urządzenie sterowe zamocowane jest obrotowo na trzonie 7. Trzon wprawiany jest w ruch obrotowy za pomocą koła sterowego znajdującego się na stanowisku manewrowym jachtu. Z urządzeniem sterowym 6 połączone są prowadnice 8 potrzebne podczas biegu wstecznego jachtu. Podczas żeglugi określonym kursem ster znajduje się w położeniu zerowym, czyli wytłaczanie strumienia wody odbywa się w osi symetrii jachtu. Podczas wykonywania zwrotów urządzenie sterowe przyjmuje położenia jak na rysunkach 3c,d. Bieg wsteczny jachtu uzyskuje się, przestawiając obrotowe prowadnice 8 w położenia jak na rysunku 3e.
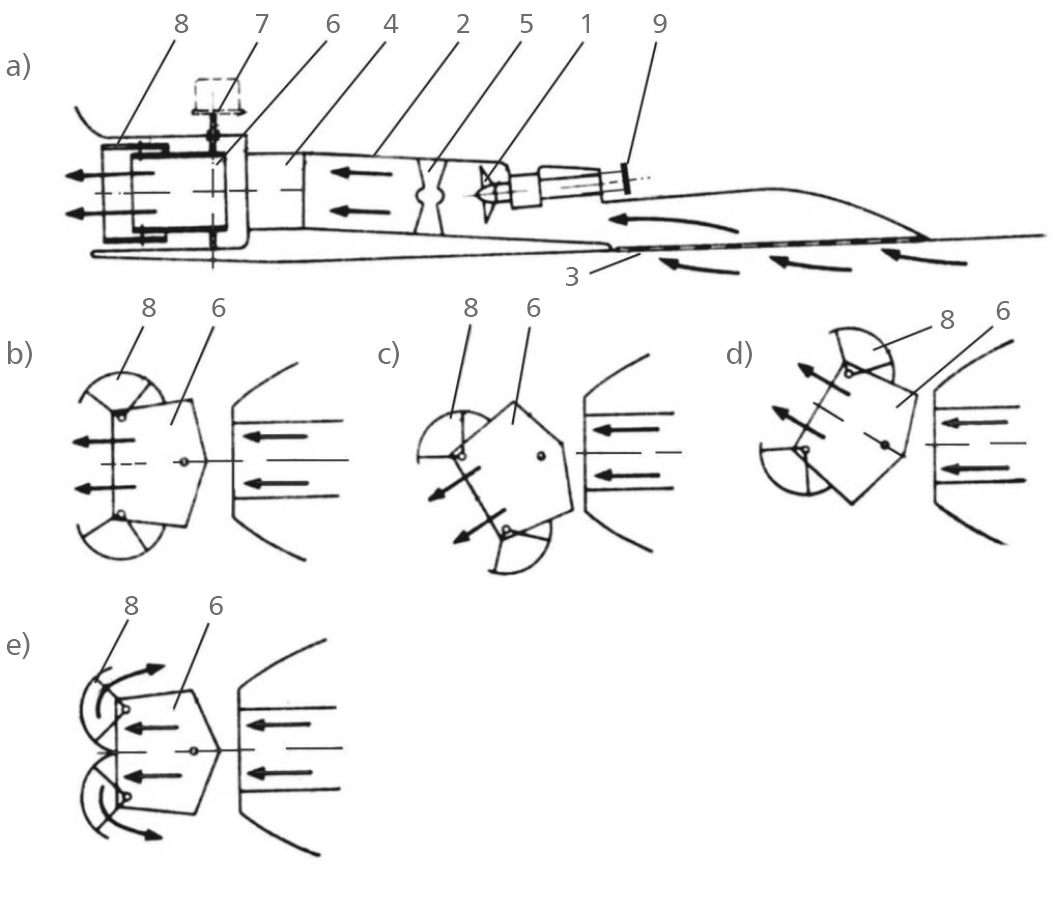
Jak wspomniałem, śrubami napędowymi są pompy śmigłowe, czyli pompy osiowe z grupy pomp wirowych (rys. 5). W pędnikach strumieniowych może znajdować się więcej wirników niż jeden, czyli będzie to wówczas pompa wielostopniowa (dwa, trzy wirniki), po to, by uzyskać jak największą siłę naporu (ciągu), a zatem dużą prędkość jachtu rzędu 30 węzłów.
Jest to zatem pompa, w której przepływ następuje wzdłuż osi wirnika. W niektórych rozwiązaniach pędników łopatki wirnika mogą być nastawne i mieć także nastawne kierownice wylotowe znajdujące się nad łopatkami. Takie rozwiązanie odpowiada tak zwanej turbinie Kaplana [3] i stąd często, mówiąc o takim pędniku, mówi się, że posiada wirnik Kaplana. Na ciężkich, wypornościowych jachtach stosuje się niekiedy pompy wirowe odśrodkowe.
Osiągi jachtu z pędnikiem strumieniowym ogólnie są gorsze od osiągów jachtu z klasyczną śrubą napędową, co wyraźnie widać na charakterystykach prędkościowych (rys. 6).
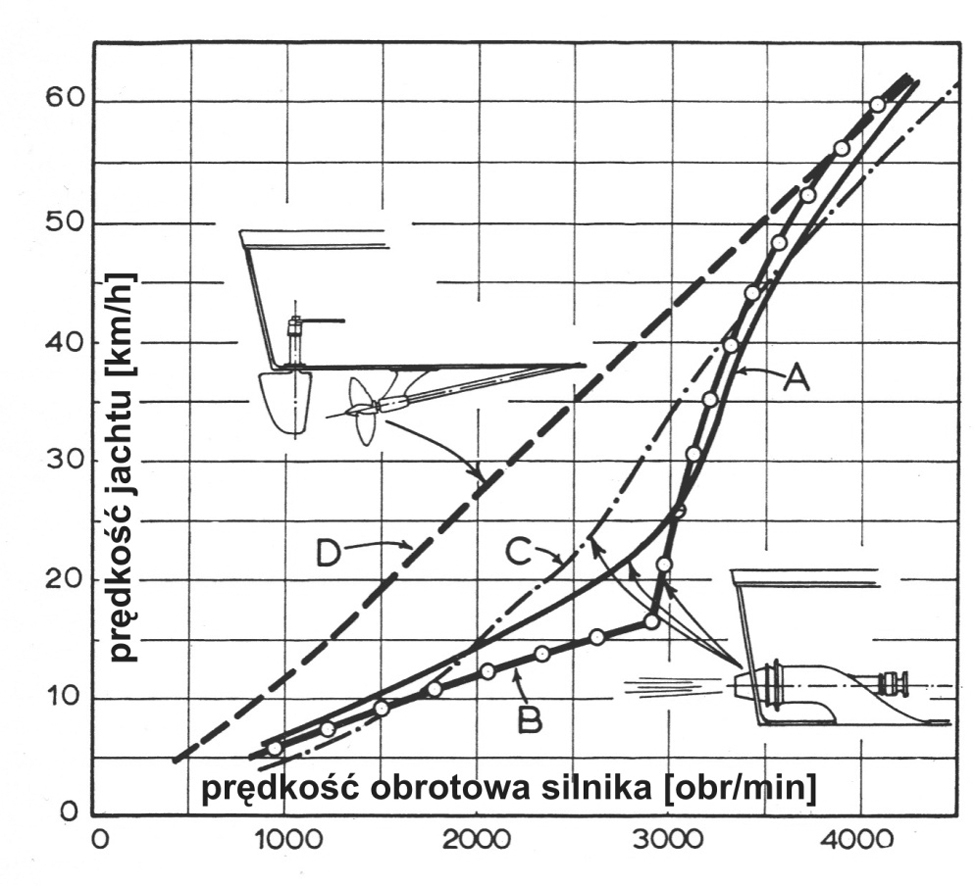
Dorównują osiągom jachtu z napędem śrubowym tylko w przedziale wysokich prędkości obrotowych silnika. Przy zmniejszaniu prędkości obrotowej silnika znacznie spada prędkość jachtu z napędem strumieniowym. I tak na przykład przy prędkości obrotowej wynoszącej 2000 obr./min wynosi ona 14 km/h, zaś dla jachtu śrubowego prawie dwa razy tyle, bo 27 km/h. Co jest zatem przyczyną mniejszych prędkości jachtu z napędem strumieniowym? Otóż, nie zagłębiając się szczegółowo w zagadnienia mechaniki przepływów, można powiedzieć, że przy niskich prędkościach obrotowych silnika strumień wody jest mniej „obfity”, co skutkuje mniejszym ciągiem napędu strumieniowego. Warto tu jednak zwrócić uwagę na to, że porównanie napędów na rysunku 6 pochodzi z minionych lat. Wprawdzie po latach zasada pracy napędów strumieniowych się nie zmieniła, to jednak dzięki wysokim technologiom te duże różnice (rys. 6) uległy istotnemu zmniejszeniu. Niezwykle ważnymi zaletami pędnika strumieniowego są: brak części wystających pod dnem jachtu, łatwe i skuteczne manewrowanie jachtem przez zmianę kierunku wypływającego strumienia wody, nawet bez stosowania sterów strumieniowych oraz możliwość dużego obciążenia pędnika. Natomiast wadą jest stosunkowo mała siła napędowa podczas ruchu jachtu wstecz. Warto tu zwrócić uwagę, że ze względu na brak elementów wystających, istnieje możliwość chwilowego cumowania dziobem jachtu na piaszczystej plaży, czego przykłady można spotkać na wybrzeżach Morza Śródziemnego, gdzie w wielu miejscach piasek usuwa się pod naciskiem wpływającego nań kadłuba. Ten brak części wystających daje możliwość żeglugi po wodach płytkich, a nawet zarośniętych. Ponadto umożliwia podejścia do innego jachtu, na przykład osadzonego na mieliźnie.
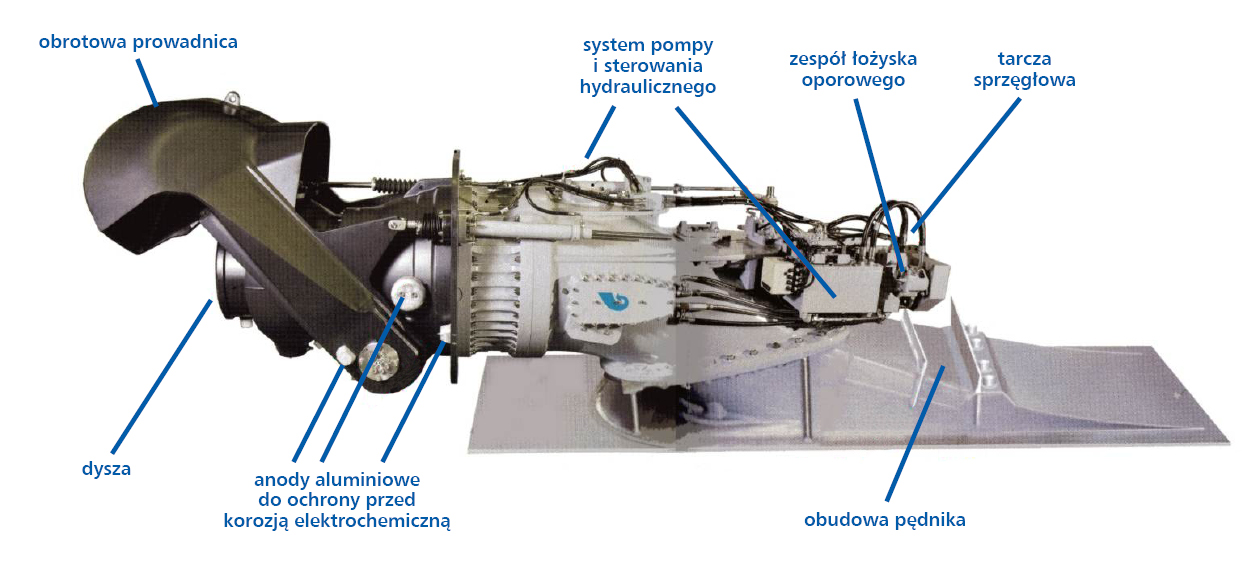
Jedną z wiodących światowych firm produkujących napędy strumieniowe jest HamiltonJet z Nowej Zelandii. Jej napędy dedykowane są rozmaitym jednostkom rekreacyjnym, rybackim, wojskowym i innym. Moce napędowe sięgają nawet kilku tysięcy kilowatów. Na rysunku 7 pokazano taką nowoczesną konstrukcję napędu strumieniowego firmy HamiltonJet.
W napędy strugowodne wyposaża się jachty zarówno jedno- jak i wielokadłubowe, szczególnie przeznaczone do eksploatacji na stosunkowo płytkich wodach.
Przykładem może być katamaran motorowo-żaglowy (rys. 8) dedykowany takiej żegludze, a dokładnie żegludze na wodach Florydy i Bahamów. Umożliwiałby on żeglowanie po różnych zakątkach Bahamów, gdzie właśnie jest płytko. Zaprojektowany on został przez Bogusława Pazorka i Andrzeja Czapiewskiego (Polska), przy współpracy z Ideas of Florida Innovative Design & Engineering Associated Services (USA) w 1999 roku.
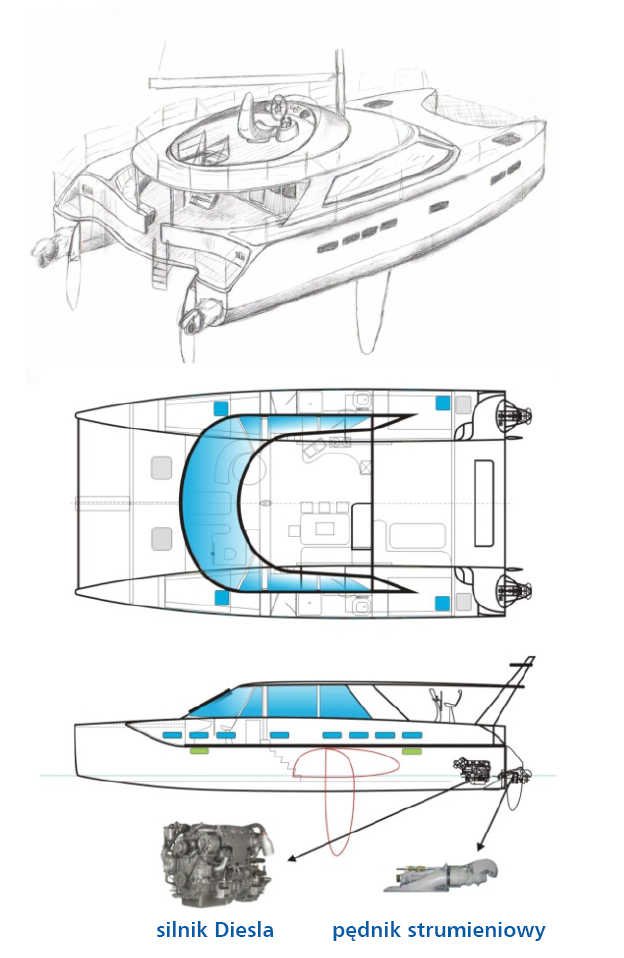
Długość całkowita jachtu wynosi 16,36 m, moc silników napędowych 460 KM, powierzchnia ożaglowania podstawowa (grot + fok) 65 m2. Wypór jachtu 102,5 kN. Przewidziano dwa silniki napędowe Diesla firmy Yanmar, każdy o mocy 230 KM, współpracujące z pędnikami strumieniowymi.
Założono, że katamaran będzie rozwijał prędkość około 20 węzłów pod żaglami, a także na silnikach. Istotną cechą katamarana jest małe zanurzenie. Stąd też obrotowe miecze i napęd strumieniowy, który nie zwiększa zanurzenia jachtu. Płynąc na silnikach, miecze byłyby chowane całkowicie w kadłuby, a płetwy sterowe unoszone do góry w celu zmniejszenia oporów. Sterowanie jednostką odbywałoby się za pomocą pędników strumieniowych.
Napęd powierzchniowy – surface drive
Charakterystyczne dla tego napędu jest to, że śruba napędowa nie jest w całości zanurzona w wodzie, a część jej skrzydeł w czasie pracy znajduje się nad powierzchnią wody.
Napędy typu surface drive są tańsze niż pędniki strugowodne i uzyskują większe prędkości, zużywając jednocześnie mniej paliwa. Wyróżniają się brakiem kawitacji, dobrą manewrowością, szczególnie przy niskiej prędkości obrotowej. Taki napęd umożliwia zwiększenie prędkości łodzi o 15–30% w porównaniu do prędkości uzyskiwanej za pomocą każdego innego rodzaju napędu. Widok jachtu i elementów jego napędu powierzchniowego pokazano na rysunku 9.

Napędy te dedykowane są szybkim jachtom motorowym o długości większej niż 8 m i prędkości maksymalnej powyżej 25 węzłów. Początkowo stosowane były w łodziach wyścigowych, wojskowych, obecnie coraz częściej w szybkich łodziach rekreacyjnych.
Mają niską masę, są bardzo wytrzymałe i żywotne, a jednostki nimi napędzane osiągają duże przyspieszenia i prędkości.
Przykładem jachtu osiągającego bardzo dużą prędkość może być jacht motorowy Royal Denship 82’ Open o długości 25 m i wyporności 60 t. Silniki o mocy 2000 KM pozwalają osiągnąć nim prędkość nawet 45 w.
Dystrybutorem napędów powierzchniowych firmy France Hélices, działającym na rynku od 1977 roku, jest polska firma JP Marine [5].
Ogólnie można powiedzieć, że napęd powierzchniowy jest najsprawniejszym i najbardziej niezawodnym spośród różnych typów napędów.
dr inż. Krzysztof Zbierski
Literatura:
[1] Perepeczko A.: Okrętowe urządzenia sterowe. Wydawnictwo Morskie, Gdańsk 1983.
[2] Kobyliński L.: Śruby okrętowe. Wydawnictwa Komunikacyjne, Warszawa 1955.
[3] Stępniewski M.: Pompy. Wydawnictwa Naukowo-Techniczne, Warszawa 1985.
[4] Baader J.: Motorkreuzer und schnelle Sportboote. Verlag Delius Klasing, Berlin 1972.
[5] www.jpmarine.pl