Silnik w napędzie jachtu morskiego, zwykle silnik Diesla, a ściślej jego charakterystyka, określa możliwości pracy śruby napędowej, ta zaś wpływa na jego obciążenie. Pracy napędu silnikowego towarzyszy więc wzajemne oddziaływanie na siebie silnika, śruby napędowej, a także kadłuba jachtu.

Opisanie współpracy silnika ze śrubą napędową, do tego w różnych warunkach żeglugi jachtu, które byłoby proste i zrozumiałe dla wszystkich czytelników, szczególnie „nietechnicznych”, nie jest łatwe. Dlatego dla wyjaśnienia stosunkowo skomplikowanych zagadnień starano się, gdzie tylko było to możliwe, unikać trudno przyswajalnych określeń techniczno-naukowych, robiąc w opisach pewne uproszczenia.
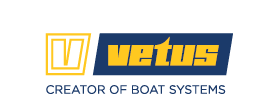
W związku z tym założono między innymi, że napędzana jest śruba stała bezpośrednio (bez przekładni) z pominięciem strat mocy w linii wałów. Tak więc moc użyteczna silnika równa jest mocy przejmowanej przez śrubę. Silnik Diesla zasilany jest natomiast układem wtryskowym z klasyczną, rzędową pompą wtryskową lub, jak zaznaczono, nowoczesnym układem Common Rail (rys.1). Spotyka się także silniki jachtowe zasilane układami paliwowymi z pompami rozdzielaczowymi, pojedynczymi pompami wtryskowymi lub pompowtryskiwaczami [1,2,3,4]. W opisie współpracy silnika ze śrubą napędową uwzględniono jednak zasilanie silnika za pomocą klasycznego układu wtryskowego z pompą wtryskową. W takie bowiem układy wyposażone są często morskie silniki Diesla. Za przyjęciem do opisu współpracy silnika ze śrubą napędową silnika z rzędową pompą wtryskową i mechanicznym regulatorem przemawiała także możliwość graficznego wyjaśnienia sposobu zasilania silnika paliwem i jego regulacji odpowiednio do obciążenia śruby napędowej. Opisanie tego samego za pomocą elektronicznej regulacji, jak np. w przypadku układu Common Rail byłoby, z dydaktycznego punktu widzenia, trudne do przyswojenia przez czytelników.
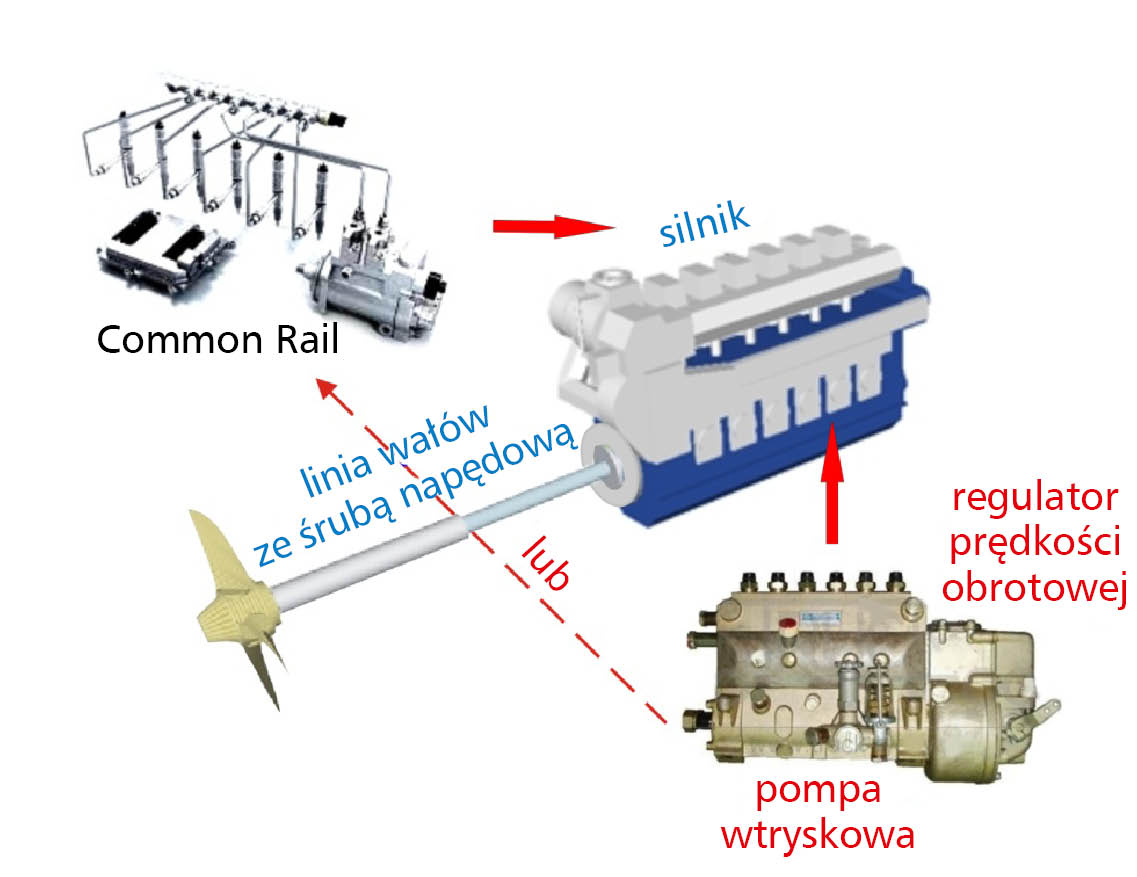
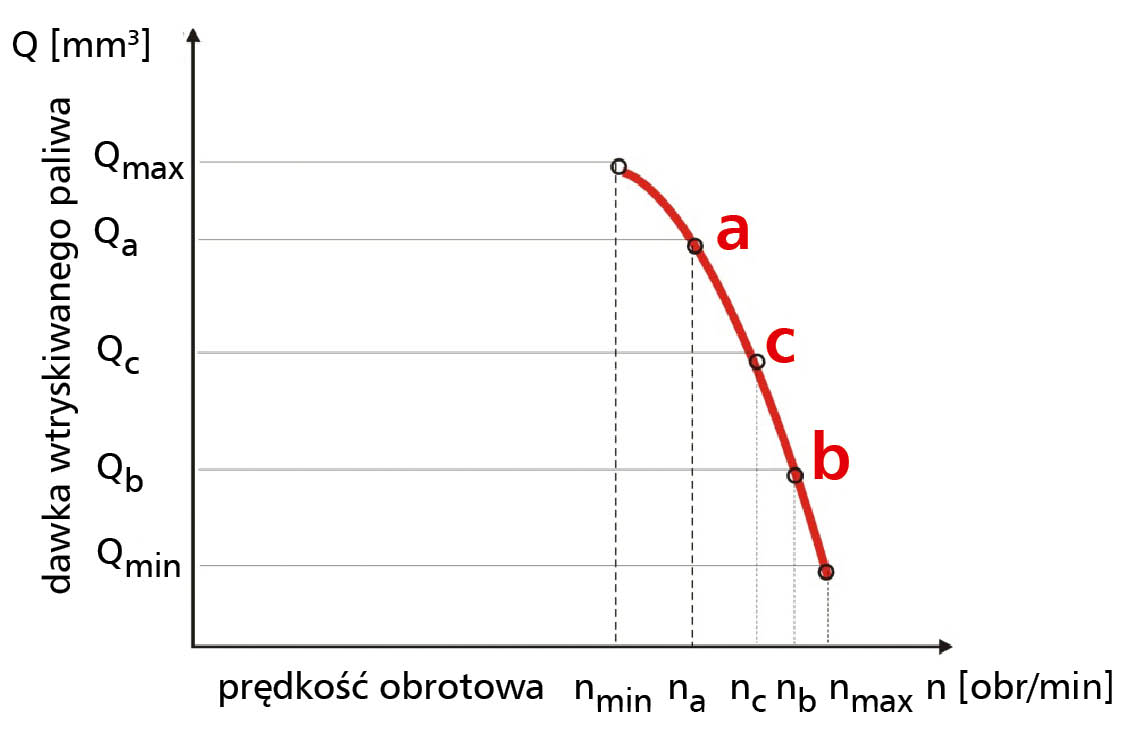
W aspekcie współpracy silnika ze śrubą wyjaśnienia wymaga tu rola regulatora prędkości obrotowej. Otóż zadaniem regulatora jest sterowanie prędkością obrotową silnika spalinowego przez utrzymywanie jego chwilowej, wymaganej prędkości obrotowej w zależności od zmiennych warunków pracy. Jest to realizowane przez odpowiednie przesuwanie listwy zębatej pompy wtryskowej, czyli przez zwiększanie lub zmniejszanie dawki paliwa. Konieczność sterowania biegiem silnika wynika także z niestabilności pracy silnika Diesla, do której przyczynia się między innymi charakterystyka pompy wtryskowej, czyli zależność dawki wtryskiwanego paliwa Q1 od prędkości obrotowej n. Charakterystyka pompy wtryskowej dlatego ma niekorzystny przebieg z punktu widzenia zapotrzebowania paliwa przez silnik spalinowy, że w miarę wzrostu prędkości obrotowej przy niezmiennym położeniu listwy sterującej (zębatej) wzrasta dawka Q1 wtryskiwanego paliwa (rys. 2). Wzrost tej dawki wynika z dławienia przepływu w otworze zasilającym pompy oraz dławienia w otworze przelewowym. Istotny wpływ ma tu również „doszczelnianie” tłoka w cylindrze pompy w miarę wzrostu prędkości obrotowej pompy wtryskowej, a tym samym przyrost pewnej objętości paliwa. Silnik natomiast potrzebuje innego przebiegu wtryskiwanej dawki, a mianowicie Q2 jak na rysunku 2. W celu dostosowania charakterystyki pompy wtryskowej Q1 do wymagań silnika, w pompie lub w regulatorze prędkości obrotowej umieszcza się specjalne korektory. One to „naginają” charakterystykę pompy tak, aby miała przebieg odpowiadający krzywej Q2.
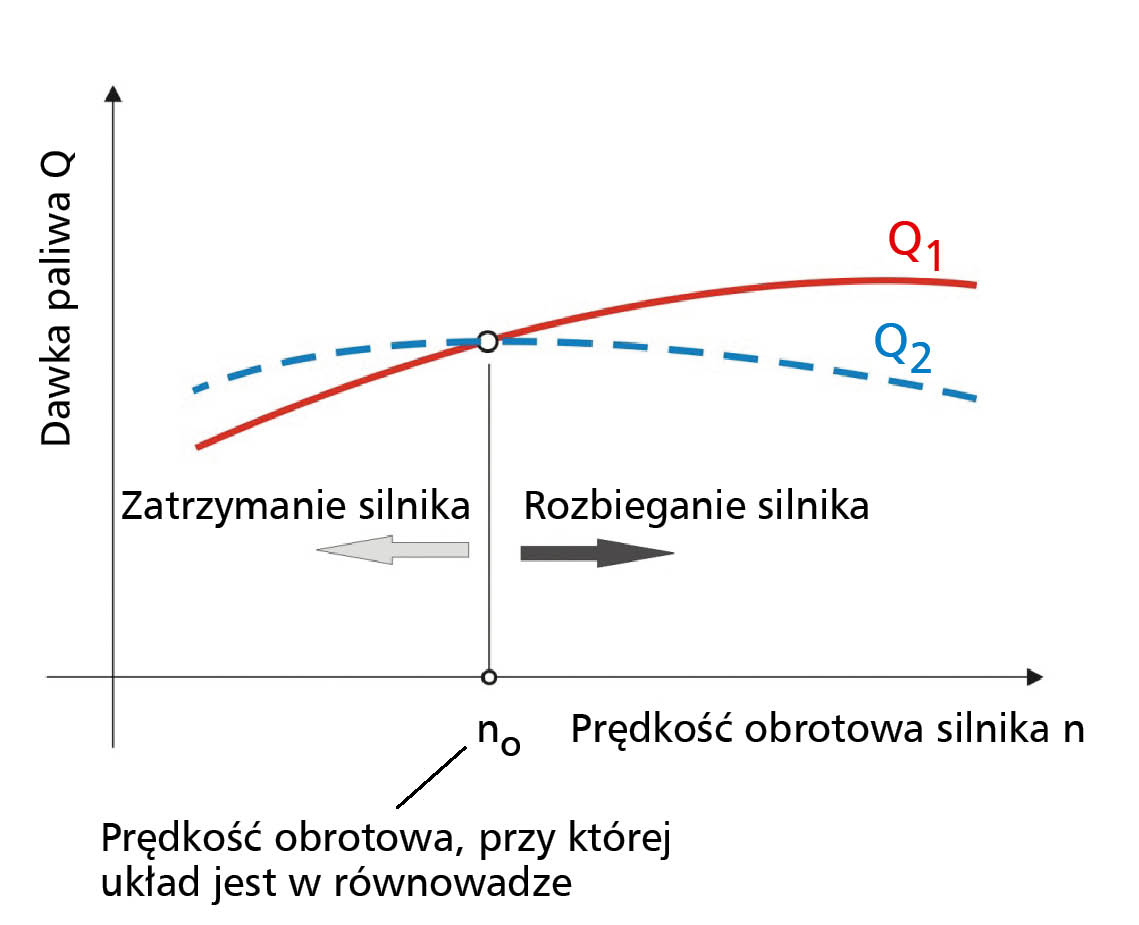
Silnik pracujący bez obciążenia musi pokonać opory własne, do czego potrzebna jest minimalna moc, a zatem i określona minimalna dawka paliwa. Dostarczenie silnikowi mniejszej dawki od wymaganej spowoduje jego zatrzymanie. Większa dawka niż wymagana przy danym obciążeniu powodować będzie wzrost prędkości. Niekontrolowany wzrost prędkości obrotowej ponad nominalną, przy nagłym zmniejszeniu lub zupełnym zdjęciu obciążenia, mógłby doprowadzić do rozbiegania się silnika. Konsekwencją rozbiegania jest uszkodzenie silnika, po prostu jego „demolka”. Mogłoby się to zdarzyć podczas wynurzania się z wody śruby napędowej w warunkach dużego falowania. Zmienne warunki obciążeń wymagałyby więc od użytkownika ciągłego sterowania pompą wtryskową, a więc doprowadzania odpowiedniej dawki w celu zachowania założonej prędkości żeglugi. A to jest niemożliwe, dlatego robi to regulator prędkości obrotowej. Jak on to robi, wyjaśnić można za pomocą rysunków 3 i 4. Otóż w tej odmianie regulatora użytkownik (sternik) za pomocą dźwigni regulatora (manetki gazu) nie powoduje ciągłego przesuwania listwy zębatej, a tylko ustawia regulator na określony zakres prędkości obrotowej. Prędkość obrotowa utrzymywana jest samoczynnie przez regulator, dopóki użytkownik nie zmieni jego ustawienia. A dzieje się to dzięki ciężarkom regulatora, które pod działaniem siły odśrodkowej mniej lub bardziej się rozchylają w zależności od chwilowej prędkości obrotowej silnika. W czasie tego rozchylania przesuwają swoimi przegubowymi ramionami listwę zębatą pompy w kierunku zwiększania bądź zmniejszania dawki paliwa.
Na przykład niech położeniu elementów regulatora c odpowiada praca przy stałej prędkości obrotowej nc (rys. 4). Wówczas moment obrotowy silnika równoważony jest przez moment oporowy obciążającej go śruby napędowej. Przy wzroście prędkości obrotowej silnika wskutek zmniejszenia się obciążenia zaczną rozchylać się wirujące ciężarki regulatora ściskające swoje sprężyny (rys. 3). Rozchylające się ciężarki poprzez swoje dolne ramiona przemieszczają czop regulatora, który ciągnie za sobą górne ramię. Ono swym drugim końcem przesuwa listwę zębatą, zmniejszając dawkę wtryskiwanego paliwa przez pompę wtryskową. Nowemu stanowi równowagi odpowiada punkt b, a więc dawka Qb i prędkość obrotowa nb (rys. 4). Jeśli natomiast wzrośnie obciążenie silnika i zmaleje jego prędkość obrotowa (w stosunku do punktu pracy c), to zmniejszy się również siła odśrodkowa rozchylająca wirujące ciężarki. Sprężyny zaczną się rozprężać, a ciężarki przesuwać w kierunku osi tulei. Spowoduje to ustawienie czopa w położenie a i przesunięcie listwy zębatej w kierunku rosnącej dawki paliwa. Nowy stan pracy a na charakterystyce regulatora odpowiadać będzie zwiększonemu obciążeniu i nieco mniejszej prędkości obrotowej niż poprzednio w punkcie c. Jak wynika z przedstawionej charakterystyki, prędkość obrotowa silnika utrzymywana jest w pewnym przedziale od nmin, któremu odpowiada największe obciążenie silnika, do nmax, a więc stanu bez obciążenia. Większy lub mniejszy obrót dźwigni sterującej powoduje ustalenie wyższego lub niższego (od przedstawionego) zakresu prędkości obrotowej regulatora. Tak więc na pracę regulatora mają wpływ dwa czynniki, a mianowicie: zmiana prędkości obrotowej, spowodowana zmianą obciążenia oraz zmiana ustawienia dźwigni sterującej przez użytkownika (sternika). Działanie tych dwóch czynników ustala odpowiednią dawkę paliwa przy określonej prędkości obrotowej.
Opisana konstrukcja regulatora jest jednym z możliwych przykładów licznych rozwiązań regulatorów i nie wyczerpuje tej bardzo szerokiej tematyki [1,2,3]. Oprócz regulatorów mechanicznych, pneumatycznych i hydraulicznych stosowane są także regulatory elektroniczne w pompach tłokowych i rotacyjnych. W układach zasilania z pompowtryskiwaczami oraz w układach Common Rail stosowana jest wyłącznie regulacja elektroniczna [4,5]. Szczególnie w tych ostatnich regulacja wtryskiwanej dawki przebiega zupełnie inaczej niż w opisanym klasycznym układzie wtryskowym. O jej wartości decyduje bowiem czas wtryskiwania.
Po tych wyjaśnieniach możemy przejść do rozważań współpracy śruby napędowej z silnikiem. Załóżmy na wstępie, że w ustalonym stanie pracy układu: śruba, silnik, kadłub, będą spełnione następujące warunki:
- moment obrotowy, konieczny do obracania śruby, musi być równoważony momentem dostarczonym przez silnik na wał śrubowy (linię wałów),
- prędkość obrotowa śruby musi być równa prędkości obrotowej silnika, z uwzględnieniem danego przełożenia,
- napór śruby musi być równoważony przez opór kadłuba.
Niech zatem pole pracy silnika, który współpracuje ze śrubą stałą przedstawia rysunek 5 [6]. Jest ono od góry ograniczone charakterystyką eksploatacyjną silnika e, od dołu natomiast charakterystyką najmniejszej mocy m rozwijanej dla konkretnej śruby. Z lewej strony ograniczenie pola stanowi krzywa u będąca charakterystyką śruby pracującej w najbardziej niekorzystnych warunkach pływania (praca śruby na uwięzi; jej prędkość postępowa wynosi zero) oraz prosta minimalnej prędkości obrotowej nmin. Z prawej strony pole ograniczone jest charakterystyką regulatorową r. W każdym punkcie pola, zaznaczonego szarym kolorem, może być spełniony warunek zachowania równowagi mocy silnika i śruby. Nie ma przy tym obawy przeciążenia silnika. Na omawiane pole nałożona jest krzywa s będąca charakterystyką prędkościową śruby współpracującej z silnikiem. Punkt Nn przecięcia charakterystyki śrubowej z charakterystyką eksploatacyjną silnika obrazuje warunki współpracy dla nominalnego (znamionowego) obciążenia silnika. Jest to jedyny punkt pracy, w którym silnik jest w pełni obciążony, a jacht uzyskuje największą prędkość w warunkach projektowych.
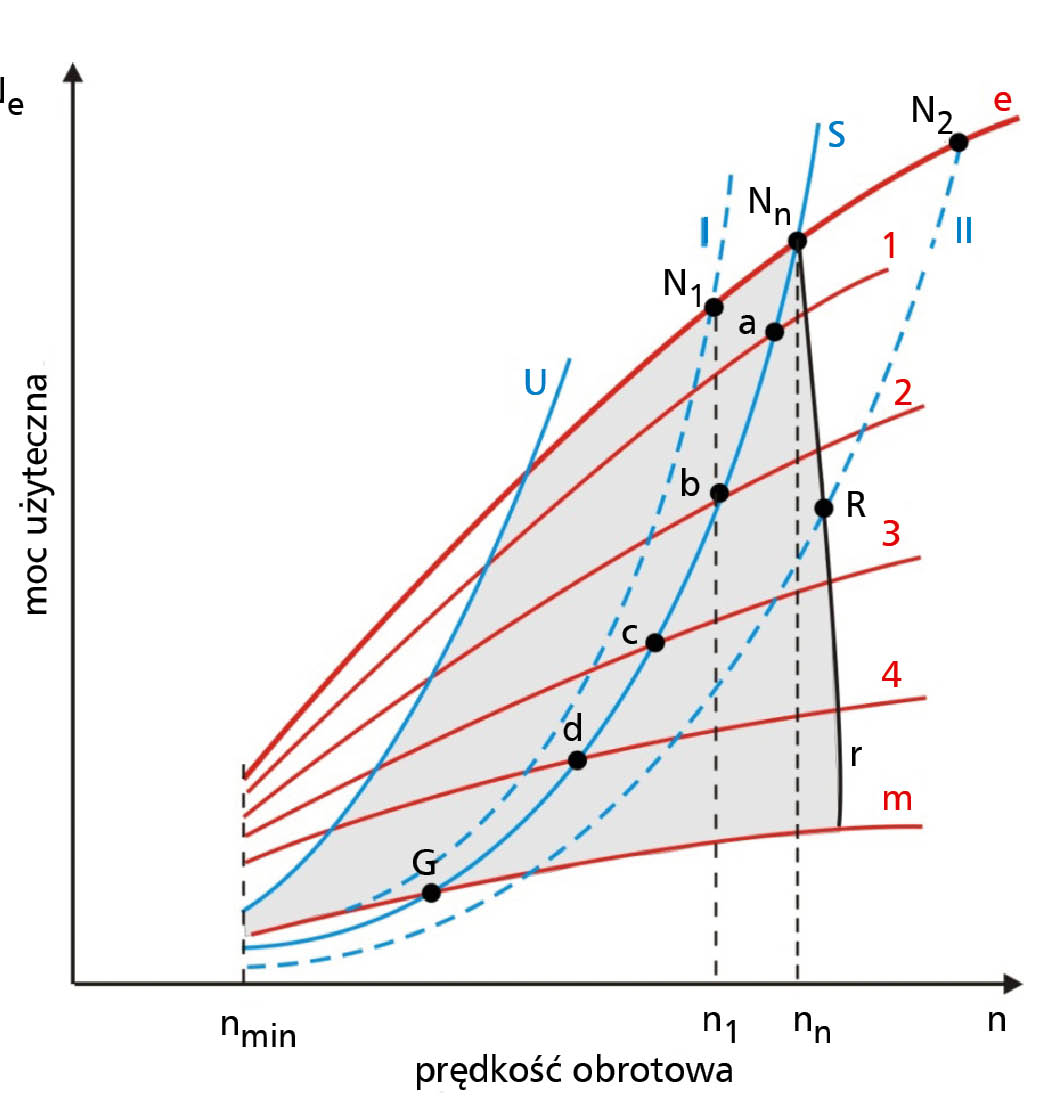
Przy zmianie dawki paliwa kolejne punkty współpracy przesuwają się do dołu po charakterystyce śrubowej, przyjmując kolejne położenia a, b, c, d, odpowiadające punktom przecięcia charakterystyki śrubowej z odpowiednimi charakterystykami mocy częściowych silnika oznaczonymi cyframi 1, 2, 3, 4. Graniczny jest punkt G określający najmniejszą moc i prędkość obrotową, jakie silnik w takich warunkach współpracy może rozwijać. Przejście tego punktu spowodowane zmniejszeniem dawki doprowadzi do zatrzymania silnika. Zatem przesunięcie listwy zębatej pompy wtryskowej, czyli zmiana dawki paliwa, pociąga za sobą zmianę mocy, momentu i prędkości obrotowej zarówno silnika, jak i śruby. W konsekwencji tego następuje zmniejszenie lub zwiększenie prędkości jachtu.
Przy pewnej stałej dawce paliwa, której odpowiada określona charakterystyka częściowa, zmiana mocy i prędkości obrotowej może nastąpić tylko wtedy, gdy zmienią się warunki żeglugi. Może to być np. wzrost falowania, burzliwa pogoda oraz inne przyczyny zmiany oporu kadłuba. Wówczas przy pogorszeniu warunków żeglugi charakterystyka śrubowa przesunie się w lewo (krzywa I).
Jeśli przyjąć, że silnik pracował z mocą nominalną (punkt Nn), to aktualne, chwilowe warunki współpracy określone zostaną przez punkt N1. Pozornie wygląda na to, że skoro nie została zmieniona dawka paliwa, to warunki współpracy powinny być określone punktem przecięcia tej krzywej z prostą nominalnej prędkości obrotowej, leżącym daleko poza obszarem dopuszczalnej pracy silnika, co byłoby jednoznaczne z przeciążeniem silnika momentem i mocą. Nie nastąpiła tu jednak wskutek przesunięcia charakterystyki śrubowej zmiana momentu, gdyż silnik pracuje na tej samej charakterystyce eksploatacyjnej. Nie bierze się tu pod uwagę zmian momentu obrotowego w punkcie N1 wynikających ze zmian współczynnika napełnienia i sprawności silnika. Moment obrotowy dla wszystkich punktów charakterystyki jest stały. Ponieważ silnik bez przeciążenia nie może rozwinąć nominalnej prędkości obrotowej nn dla punktu N1, prędkość obrotowa n1 ustala się samoczynnie. Współpraca w punkcie N1 trwa tak długo, dopóki nie ustaną przyczyny, które spowodowały przesunięcie charakterystyki. Wtedy warunki współpracy silnika ze śrubą określone są z powrotem przez punkt Nn. W warunkach pracy lżejszych od projektowych charakterystyka śrubowa przesunie się w prawo, odpowiadając np. krzywej II. Wynika z tego, że przy momencie odpowiadającym nominalnemu dawkowaniu warunki współpracy określałby punkt N2, któremu odpowiadałaby większa moc i prędkość obrotowa niż w punkcie Nn. Oznaczałoby to tym razem przeciążenie mocą i prędkością obrotową. Wzrost mocy w tym punkcie, bez przyrostu momentu, spowodowany jest wzrostem prędkości obrotowej. Przeciwdziała temu regulator, zmniejszając dawkę paliwa, w wyniku czego silnik „przechodzi” na charakterystykę regulatorową r. Nowe warunki współpracy określone są przez punkt R. Leży on teraz na charakterystyce mocy częściowej, której odpowiada mniejszy moment niż moment dla nominalnej dawki paliwa.
Opisane przesuwanie się charakterystyk śrubowych ma miejsce między innymi w czasie sztormowania przy wzdłużnych przechyłach jachtu. Wtedy wynurzonej chwilowo z wody śrubie odpowiada płaska charakterystyka przesunięta w prawo. Z chwilą ponownego zanurzenia się śruby praca powraca do charakterystyki pierwotnej lub przesuwa się z kolei w lewo.
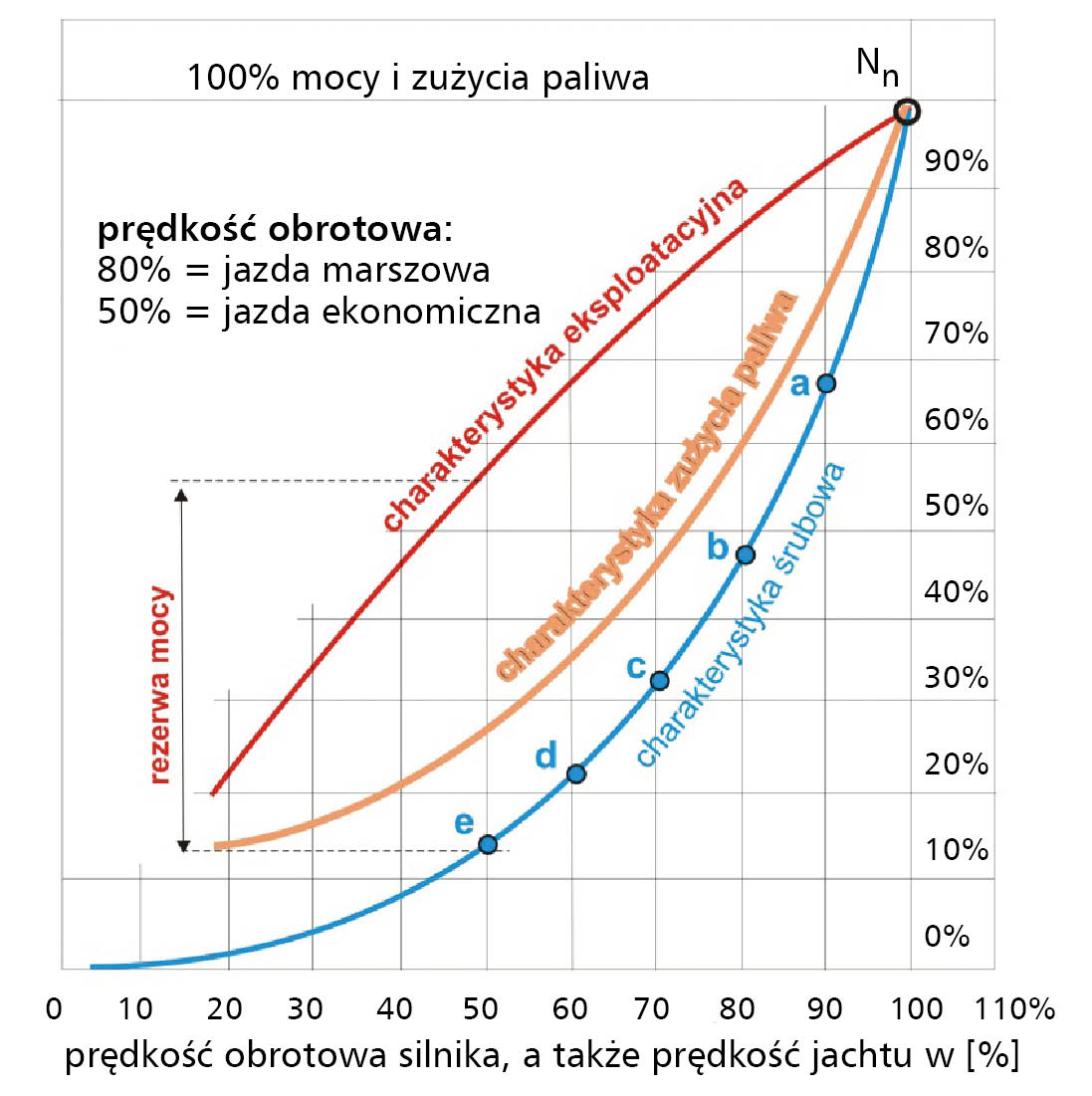
Podczas normalnej żeglugi warunki współpracy śruby z silnikiem określone są zwykle nie przez punkt Nn, lecz przez pewien punkt leżący na charakterystyce śrubowej, na przykład a, b czy też c (rys. 6). Jest to spowodowane przyjęciem pewnej rezerwy mocy na wypadek ewentualnego wzrostu oporów, jak również ze względu na ekonomiczne zużycie paliwa. Przyjmuje się zwykle tzw. prędkość marszową odpowiadającą warunkom, w których silnik rozwija ok. 80% swojej nominalnej prędkości obrotowej, dysponując przy tym pewnym zapasem mocy. Nie jest to tzw. jazda ekonomiczna, do osiągnięcia której punkt współpracy musiałby się jeszcze bardziej obniżyć na charakterystyce śrubowej. Odpowiada ona zwykle prędkości obrotowej silnika w granicach 50%. Wzajemne zależności między założoną prędkością obrotową silnika (a także prędkością jachtu) i wynikającą z tego mocą eksploatacyjną oraz zużyciem paliwa i dysponowaną rezerwą mocy przedstawia omawiany rysunek 6. Rezerwę mocy (przykładowo w punkcie e) obrazuje pionowa odległość między charakterystyką eksploatacyjną a charakterystyką śrubową. Przyjęcie mniejszego lub większego zapasu mocy wynika także często z przeznaczenia napędu. Większy zapas mocy przyjmuje się wtedy, gdy napęd spełnia rolę napędu głównego.
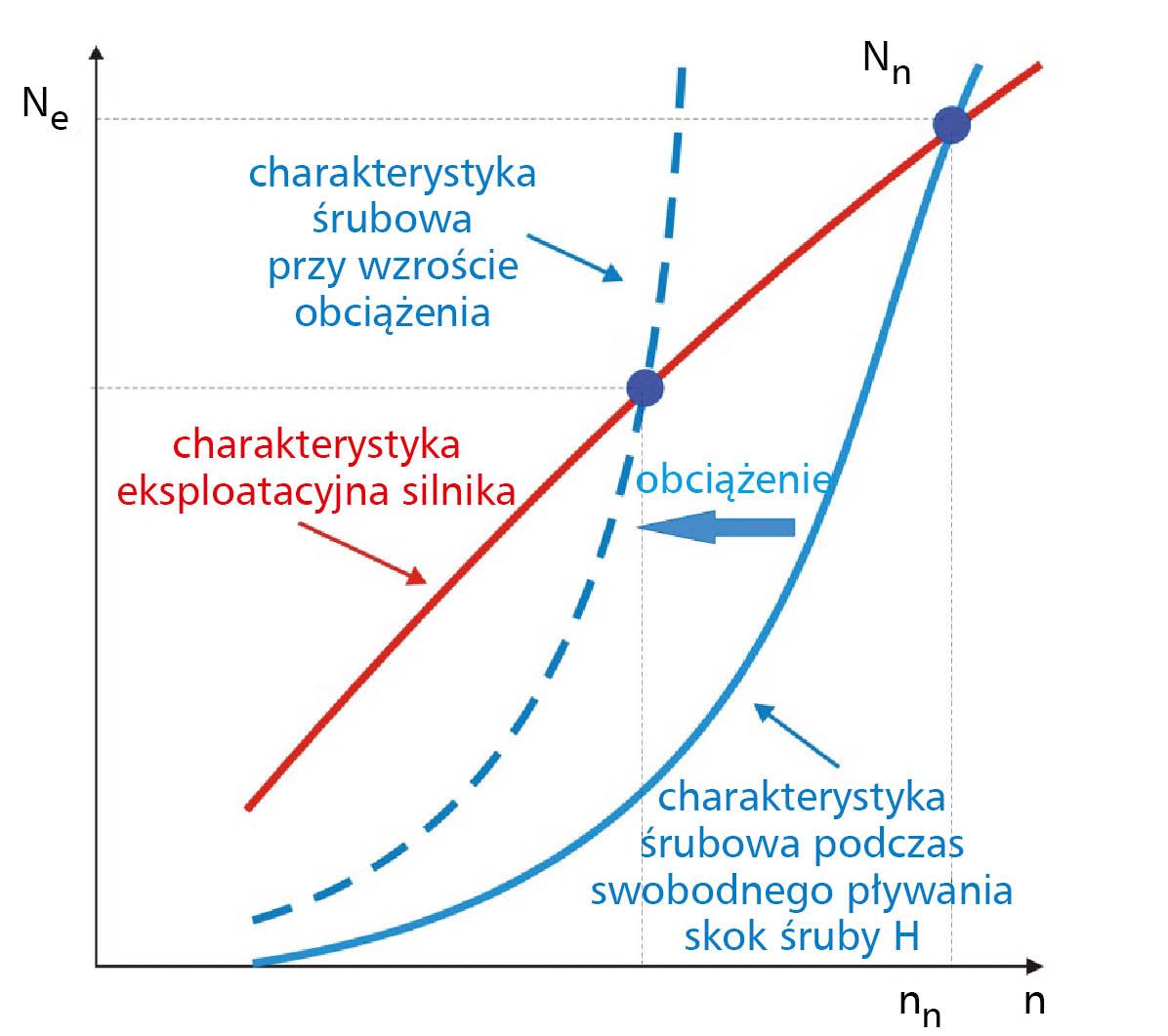
Przedstawione rozważania na temat współpracy silnika ze śrubą napędową przeprowadzone zostały z pominięciem przekładni i z uwzględnieniem śruby stałej. Zrobiono to celowo, gdyż jest to podstawowy przypadek współpracy. Taki bowiem zestaw jest układem odniesienia do omówienia przypadków, gdy w napędzie znajduje się przekładnia, śruba nastawna lub składana, a także kilka silników napędowych. Co ważne, mogą być przecież jeszcze napędy hydrauliczne czy spalinowo-elektryczne. Omówienie tych wszystkich wykracza poza ramy niniejszego artykułu. Niemniej jednak na zakończenie, chociaż krótko, o współpracy wymienionych śrub nastawnej i składanej z silnikiem napędowym. Współpracę silnika ze śrubą nastawną przedstawiono na rysunku 7. Założono, że podczas pływania swobodnego skrzydła śruby są tak ustawione, że jej skok wynosi H. Współpraca silnika ze śrubą ustali się w punkcie, któremu odpowiada obciążenie silnika mocą nominalną Nn Załóżmy, że w pewnej chwili wzrośnie obciążenie, czyli opory pływania (np. silny wiatr przeciwny, falowanie morza). Wówczas charakterystyka śrubowa stanie się bardziej stroma, a moc zmaleje do wartości opisanej punktem N1. Zmniejszając skok śruby, można uzyskać dowolne przesuniecie charakterystyki w prawo (będzie mniej stroma), w tym również w pierwotne położenie.
Dość praktycznym i wygodnym rozwiązaniem są śruby składane stosowane niekiedy na małych jachtach [4]. W śrubach tych w zależności od obciążenia zmienia się ich średnica. Tak więc w czasie żeglugi naprzód w miarę wzrostu oporów maleje kąt między osią wału a skrzydłami śruby, a zatem i średnica śruby.
Mimo niewątpliwie wielu zalet śrub nastawnych i składanych, ich sprawności są mniejsze od sprawności śrub stałych.
dr inż. Krzysztof Zbierski
Literatura:
[1] Falkowski H., Hauser G., Janiszewski T., Jaskuła A.: Układy wtryskowe silników wysokoprężnych. Wydawnictwa Komunikacji i Łączności, Warszawa 1989.
[2] Falkowski H., Krępeć T.: Obsługa i naprawa aparatury paliwowej silników wysokoprężnych. Wydawnictwa Komunikacji i Łączności, Warszawa 1979.
[3] Zbierski K.: Tendencje w zasilaniu szybkoobrotowych silników o zapłonie samoczynnym. Wydawnictwo Politechniki Łódzkiej, Łódź 1998.
[4] Zbierski K.: Działanie śruby napędowej. Biuletyn Techniki Jachtowej 3/2020. Wydawca VETUS, Warszawa.
[5] Zbierski K.: Układy wtryskowe Common Rail. Wydawnictwo MiW, Łódź 2001.
[6] Zbierski K.: Dieslowskie napędy jachtów. Wydawca Studio M, Łódź 2012. Rys. 7. Współpraca silnika ze śrubą nastawną